finding 3d location of rfid tag using slam To reduce labor costs, the simultaneous localization and mapping (SLAM) technique is designed to localize the mobile robot and build a map of the RFID tags simultaneously. In this study, . The Animal Crossing NFC cards can be used to call your favorite villagers into your Animal Crossing: Happy Home Designer game and allow you to decorate the homes of the villagers on the cards. You can also use the cards to invite .AFC/NFC Wild-Card Round TBA at TBA . NFC Championship Game NFC at NFC : Site City TBD : 3:00pm ET FOX---AFC Championship Game AFC at AFC .
0 · Simultaneous Localization and Mapping Using the Phase of
1 · Simultaneous Localization and Mapping
2 · SLAM
3 · Robust Simultaneous Localization and Mapping Using the
4 · Real
5 · RF
6 · GitHub
7 · A Real
8 · 3D Localization of RFID Tags with a Single Antenna by a Moving
9 · 3D Localization of RFID Tags with a Sin
10 · 3. SLAM Method for an Indoor Mobile Robot Based on an HF
11 · 3. SLAM Method for an Indoor Mobile R
How to use Quick Share: Find the file, photo, or content you want to share. Tap on the Share button. Select Quick Share. Your device will start looking for devices with Quick Share activated .
In this paper, we propose a prototype method for fast and accurate 3D localization of RFID-tagged items by a mobile robot. The robot performs Simultaneous Localization of its .
In this article, we propose an RFID-based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the tags’ 3D .To reduce labor costs, the simultaneous localization and mapping (SLAM) technique is designed to localize the mobile robot and build a map of the RFID tags simultaneously. In this study, .
Recent approaches use synthetic aperture and phase-unwrapping on a SLAM-enabled mobile robot, solving a convex optimization problem to allow for real-time tags . An indoor simultaneous localization and mapping (SLAM) problem for a mobile robot using the Radio Frequency IDentification (RFID) technology is considered. The system .
In this paper, we propose an RFID based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the . This paper presents an algorithm of simultaneous localization and mapping (SLAM) with a scanning laser range finder and radiofrequency identification technology (RFID) to . In this paper, we present a prototype method for 3D localization of UHF RFID tags by a moving robot. The proposed method represents an extension of Phase ReLock, . We deal with a Simultaneous Localization And Mapping (SLAM) problem, where the position of the tags must be estimated to create a reference map, within which the robot will be .
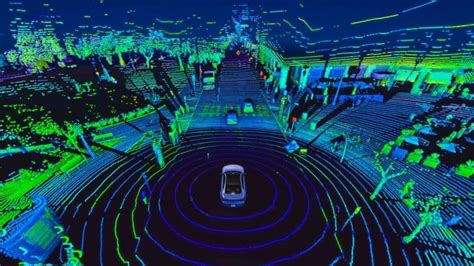
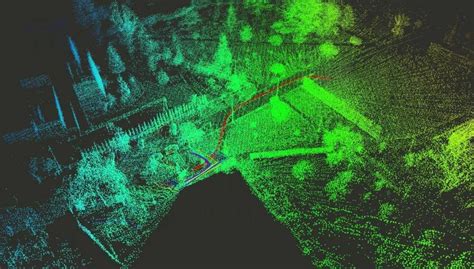
This project provides tools for robot LiDAR-based mapping and localization. This is an advanced and fine-tuned version of open3d_slam and subject to it's license.
In this paper, we propose a prototype method for fast and accurate 3D localization of RFID-tagged items by a mobile robot. The robot performs Simultaneous Localization of its own pose and Mapping of the surrounding environment (SLAM).In this article, we propose an RFID-based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the tags’ 3D position in the warehouse environment simultaneously without any reference tags and external sensors, using only COTS RFID device.To reduce labor costs, the simultaneous localization and mapping (SLAM) technique is designed to localize the mobile robot and build a map of the RFID tags simultaneously. In this study, multiple HF-band RFID readers are installed on the bottom of an omnidirectional mobile robot and RFID tags are spread on the floor.
Recent approaches use synthetic aperture and phase-unwrapping on a SLAM-enabled mobile robot, solving a convex optimization problem to allow for real-time tags localization even in the 3D.
An indoor simultaneous localization and mapping (SLAM) problem for a mobile robot using the Radio Frequency IDentification (RFID) technology is considered. The system consists of a reader, installed on the robot, which measures the phase shift of the UHF-RFID signals coming from a set of passive tags deployed on the ceiling of the environment. In this paper, we propose an RFID based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the tags' 3D position. This paper presents an algorithm of simultaneous localization and mapping (SLAM) with a scanning laser range finder and radiofrequency identification technology (RFID) to include landmarks of an object or place within a generated map. In this paper, we present a prototype method for 3D localization of UHF RFID tags by a moving robot. The proposed method represents an extension of Phase ReLock, PhaseReLockJournal, in 3D.
We deal with a Simultaneous Localization And Mapping (SLAM) problem, where the position of the tags must be estimated to create a reference map, within which the robot will be localized.This project provides tools for robot LiDAR-based mapping and localization. This is an advanced and fine-tuned version of open3d_slam and subject to it's license. In this paper, we propose a prototype method for fast and accurate 3D localization of RFID-tagged items by a mobile robot. The robot performs Simultaneous Localization of its own pose and Mapping of the surrounding environment (SLAM).
java smart card io
In this article, we propose an RFID-based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the tags’ 3D position in the warehouse environment simultaneously without any reference tags and external sensors, using only COTS RFID device.To reduce labor costs, the simultaneous localization and mapping (SLAM) technique is designed to localize the mobile robot and build a map of the RFID tags simultaneously. In this study, multiple HF-band RFID readers are installed on the bottom of an omnidirectional mobile robot and RFID tags are spread on the floor. Recent approaches use synthetic aperture and phase-unwrapping on a SLAM-enabled mobile robot, solving a convex optimization problem to allow for real-time tags localization even in the 3D. An indoor simultaneous localization and mapping (SLAM) problem for a mobile robot using the Radio Frequency IDentification (RFID) technology is considered. The system consists of a reader, installed on the robot, which measures the phase shift of the UHF-RFID signals coming from a set of passive tags deployed on the ceiling of the environment.
In this paper, we propose an RFID based simultaneous localization and mapping (RF-SLAM) method that allows us, for the first time, to estimate the robot's position and the tags' 3D position. This paper presents an algorithm of simultaneous localization and mapping (SLAM) with a scanning laser range finder and radiofrequency identification technology (RFID) to include landmarks of an object or place within a generated map. In this paper, we present a prototype method for 3D localization of UHF RFID tags by a moving robot. The proposed method represents an extension of Phase ReLock, PhaseReLockJournal, in 3D.
We deal with a Simultaneous Localization And Mapping (SLAM) problem, where the position of the tags must be estimated to create a reference map, within which the robot will be localized.
Simultaneous Localization and Mapping Using the Phase of
Beam is the default 'mode' of NFC for all Android devices. Only in KitKat (Android 4.4) there is an option to temporarily disable this mode in-app.
finding 3d location of rfid tag using slam|RF